
Важные новости
Общество 2024.10.02

Авто за 1,5 млн и загородный коттедж: в декларации главного таможенника страны Звягинцева обнаружили "пробелы"
Общество 2024.09.26

Реєстр волонтерів і як не потрапити на гачок шахраїв
Общество 2024.09.23

Корупція в дії: як ТОВ "НЬЮ БІЛД ІСТЕЙТ" привласнюють бюджетні кошти під виглядом ремонту шкільних підвалів
Общество 2024.09.17

Призначений начальник Білозерської селищної військової адміністрації Херсонської області має дружину з російським громадянством та зареєстрував бізнес при окупаційній владі
вологість:
тиск:
вітер:
Лидар научили видеть сквозь туман
Инженеры разработали метод, позволяющий лидарам различать в сильном тумане предметы, которые невозможно увидеть невооруженным взглядом. Для этого лидар на лету анализирует свойства рассеивающей среды и на основе этих данных вычленяет из общего сигнала его часть, отраженную от предметов, а не частиц тумана. Метод позволяет получать как само изображение, так и карту глубины для него, сообщается в работе, которая будет представлена на конференции ICCP 2018, передает nplus1.
Лидар представляет собой прибор, который направленно излучает и на основе времени возвращения отраженного лазерного луча получает данные об объектах. Лидары применяют в разных сферах, в том числе ими пользуются практически все разработчики беспилотных автомобилей. За счет таких приборов автомобиль может в реальном времени составлять трехмерную карту объектов вокруг себя. Тем не менее, у лидаров есть и слабые места. Например, поскольку излучаемый свет проходит через воздух, он рассеивается не только на крупных предметах, но в самом воздухе. Чистый воздух не мешает современным лидарам, но что-то увидеть сквозь плотный и непрозрачный туман все еще сложно.
Исследователи под руководством Рамеша Раскара (Ramesh Raskar) из Массачусетского технологического института разработали метод, позволяющий лидарам разделять сигнал, отраженный от объектов и рассеянный в среде перед ним, даже в очень плотном тумане. Он устроен следующим образом. Источник света излучает импульсы в туманную среду, в которой находятся объекты. Рядом с излучателем располагается камера из массива однофотонных детекторов размером 32 на 32 детектора, которые записывают время получения каждого фотона с временным разрешением 56 пикосекунд. Пиксели в каждом кадре содержат информацию о времени получения первого фотона. На основе этих кадров строится гистограмма, в которой каждый столбец описывает количество зарегистрированных фотонов за кадр. Эти гистограммы описываются гамма-распределением, зависящим от параметров среды. В данном случае они зависят от оптической толщины тумана.
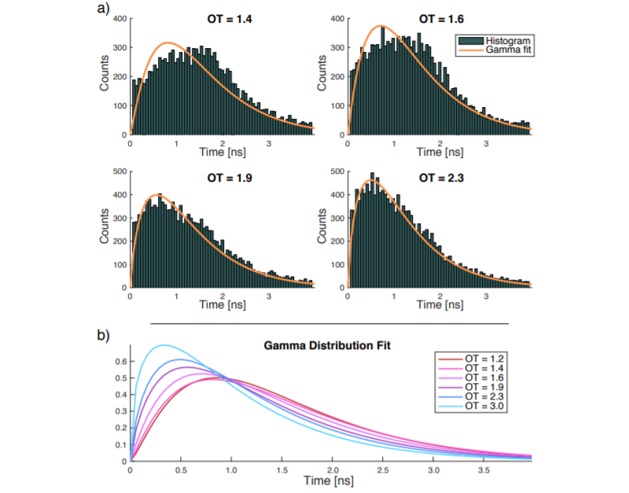
Временное распределение фотонов в зависимости от оптической толщины тумана
Guy Satat et al. / ICCP 2018
Временное распределение сигнала от объектов, в свою очередь, описывается гауссовским распределением. Исходя из этого исследователи создали модель, которая позволяет разделить сигнал отражения от частиц тумана и сигнал отражения от объектов.
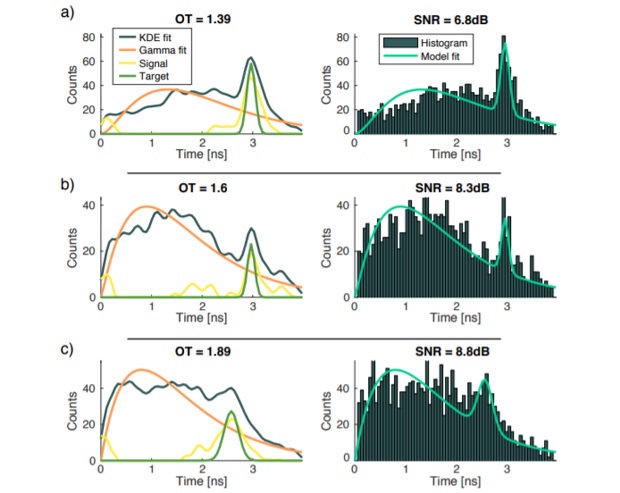
Разделение сигналов от тумана и объекта
Guy Satat et al. / ICCP 2018
 Мир «Армия КНДР: численность и место в рейтинге войск мира»
Мир «Армия КНДР: численность и место в рейтинге войск мира»  Политика «Украина должна иметь право голоса при обсуждении своего будущего, – Харрис»
Политика «Украина должна иметь право голоса при обсуждении своего будущего, – Харрис»  Наука и техника «Джон Хопфилд и Джеффри Хинтон: Нобелевская премия за работы, лежащие в основе машинного обучения»
Наука и техника «Джон Хопфилд и Джеффри Хинтон: Нобелевская премия за работы, лежащие в основе машинного обучения»  Общество «Верховная Рада ввела е-удостоверение ветерана»
Общество «Верховная Рада ввела е-удостоверение ветерана»  Политика «Зеленського обурює велика кількість чоловіків, які є заброньовані від служби»
Политика «Зеленського обурює велика кількість чоловіків, які є заброньовані від служби»  Мир «Один з топ-слуг Кремля зацікавився квадроберами»
Мир «Один з топ-слуг Кремля зацікавився квадроберами»