
Важные новости
Общество 2024.10.24

Заміські вілли за неоднозначні вердикти? Суддів Чернігівської апеляції запідозрили в конфлікті інтересів
Общество 2024.10.22

Російські спецслужби вербують навіть дітей, наймолодшому – 10 років. Інтерв'ю з прокурором Харківщини Олександром Фільчаковим
Общество 2024.10.22

Медичні циклотрони: Інвестиції для порятунку або черговий тендерний скандал?
Общество 2024.10.17

До рейтингу Times Higher Education увійшли 17 українських вишів, – Міносвіти
вологість:
тиск:
вітер:
Ученые создали самоуправляемые "автомобили-роботы" микроскопического масштаба
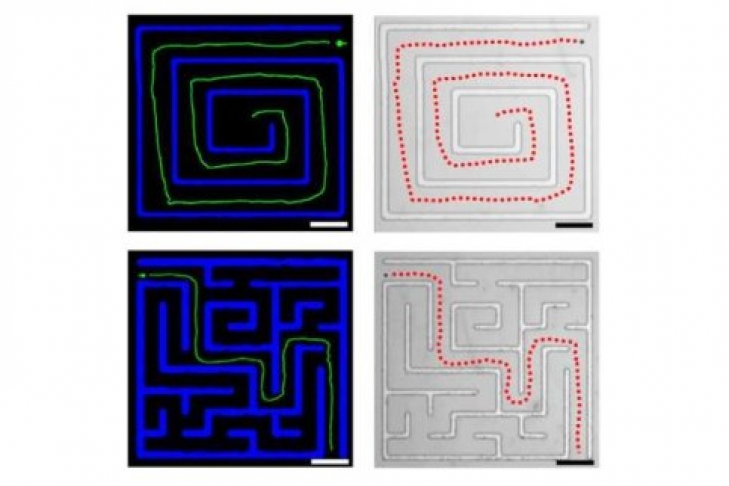
Группа исследователей, возглавляемая Лонгкью Ли (Longqiu Li) из Харбинского Технологического института (Harbin Institute of Technology), Китай, работая совместно с группой Джозефа Вона (Joseph Wang) из Калифорнийского университета в Сан-Диего (University of California San Diego), США, разработала микромасштабный вариант самоуправляемых транспортных средств. 5-микрометровые сферические микродвигатели, совершая короткие перемещения, могут самостоятельно пройти сквозь микролабиринт произвольной формы и достичь точки выхода из него. Исследователи считают, что у таких "умных микроскопических транспортных средств" имеется большое будущее в области биомедицины, где они смогут выполнять задачи по целевой доставке лекарственных препаратов, по борьбе с раковыми клетками и т.п.
"Мы подключили технологии искусственного интеллекта к микро- и нанороботам" - рассказывает Лонгкью Ли, - "Благодаря этому микроскопическое транспортное средство способно ориентироваться и маневрировать в условиях сложной и динамически изменяющейся окружающей среды. И, подобно своим полномасштабным коллегам, наши крошечные "автомобили-роботы" способны самостоятельно передвигаться, избегая столкновений с препятствиями и друг с другом".
До последнего времени для управления микро- и наномашинами использовались системы с обратными связями, при помощи которых эти машины могли передвигаться только строго по заранее заданному пути. Новая же система позволяет провести микромашину через среду, которая может кардинально измениться в любой момент времени и в которой могут появиться другие точно такие же микромашины.
Так же как и в других системах, в данной системе используется обратная связь в виде камеры, установленной на объектив микроскопа. Данные с этой камеры поступают на "процессор выявления признаков", который идентифицирует препятствия и изменения окружающей микромашину среды. Построенная карта поступает для дальнейшей обработки в программу-планировщик на базе искусственного интеллекта, которая при помощи алгоритмов поиска пути составляет перечень возможных путей передвижения микромашины. Затем при помощи методов нечеткой логики производится выбор оптимального и самого короткого пути, после чего генерируется последовательность команд управления генератором магнитного поля, под воздействием которого и движется микромашина.
Планировщик, который является основой "умной навигационной системы", способен обнаружить, когда микромашина под влиянием разных факторов, помех и шума, к примеру, начинает отклоняться от проложенного пути. В случае обнаружения отклонения производится вычисление его величины и вырабатывается ряд корректирующих значений, которые возвращают микромашину назад на заданный путь.
"В будущем мы планируем применить изобретенные нами принципы и технологии для создания микро- и наноробототехнических систем для биомедицины и для осуществления манипуляций наноразмерными объектами" - рассказывает Лонгкью Ли. Для реализации поставленных целей исследователи планируют разработать более сложные микромашины-роботы и более совершенную систему управления, которая позволит реализовать такие функции, как экстренное торможение, круиз-контроль, движение по определенной "полосе" и снабдить их возможностью оказывать воздействие на окружающую среду.
 Политика «Україна може програти, якщо США скоротять допомогу, – Зеленський»
Политика «Україна може програти, якщо США скоротять допомогу, – Зеленський»  Общество «Умєров вручив заслужені відзнаки Міноборони трьом захисницям»
Общество «Умєров вручив заслужені відзнаки Міноборони трьом захисницям»  Происшествия «Спротив триває: 1001-а доба протистояння України збройної агресії росії»
Происшествия «Спротив триває: 1001-а доба протистояння України збройної агресії росії»  Происшествия «Молодик шукав легких грошей, тому вирішив допомогти ворогу бити ракетами по Україні»
Происшествия «Молодик шукав легких грошей, тому вирішив допомогти ворогу бити ракетами по Україні»  Мир «Британия ввела санкции против Фирташа и отобрала у него станцию лондонского метро»
Мир «Британия ввела санкции против Фирташа и отобрала у него станцию лондонского метро»  Мир «Невідомий рашист намагався зірвати візит Олени Зеленської до Словенії»
Мир «Невідомий рашист намагався зірвати візит Олени Зеленської до Словенії»