
Важные новости
Общество 2024.10.24

Заміські вілли за неоднозначні вердикти? Суддів Чернігівської апеляції запідозрили в конфлікті інтересів
Общество 2024.10.22

Російські спецслужби вербують навіть дітей, наймолодшому – 10 років. Інтерв'ю з прокурором Харківщини Олександром Фільчаковим
Общество 2024.10.22

Медичні циклотрони: Інвестиції для порятунку або черговий тендерний скандал?
Общество 2024.10.17

До рейтингу Times Higher Education увійшли 17 українських вишів, – Міносвіти
вологість:
тиск:
вітер:
В Гарварде создали сверхлегкого миниатюрного летающего робота
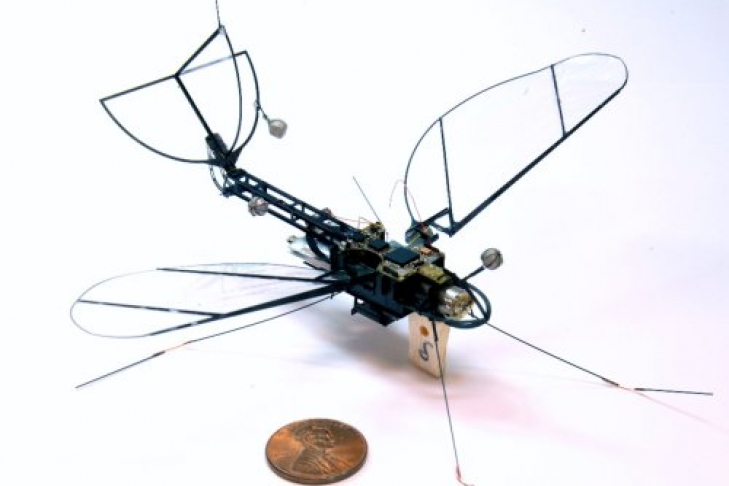
Исследователи из Гарвардского университета уже в течение нескольких лет работают над созданием и совершенствованием самого маленького в мире летающего робота RoboBee. Этот робот имеет размеры, сопоставимые с размером нормальной пчелы и он настолько мал, что нет никакой возможности снабдить его собственным источником энергии и вычислительным устройством для того, чтобы отправить его в самостоятельный полет. Поэтому исследователи задались вопросом, какие минимальные размеры должен иметь летающий робот для того, чтобы обладать возможностью полностью автономного полета. И в результате всего этого на свет появился новый FWMAV-аппарат (Flapping-Wing Micro-Air Vehicle), который достаточно мал для того, чтобы называться "микро", и достаточно велик для того, чтобы иметь возможность летать полностью самостоятельно.
Исследователи продемонстрировали, что для того, чтобы сохранять стабильность полета, роботу требуется размахивать крыльями 70-80 процентов времени. Однако крылья и прочие элементы конструкции робота столь малы и хрупки, что после 40 испытательных полетов робот начал часто ломаться и стал терять эффективность полета.
Размах крыльев FWMAV-робота составляет 16 сантиметров, а его вес равен всего трем граммам, половина из которых приходится на двигатель. Как упоминалось немного выше, он имеет источник энергии, электронную систему управления и коммуникаций. По своим размерам и стилю полета робот FWMAV больше всего походит на табачную моль (tobacco hawkmoth). Размахивая крыльями с частотой 25 Гц (раз в секунду) робот создает подъемную силу в 4 грамма, которой достаточно для того, чтобы он удерживался в воздухе и летать со скоростью около 5 метров в секунду.

Колебательные движения крыльев вырабатываются пружинной передачей, изготовленной из углеродистого волокна, которая преобразовывает вращательное движение двигателя в поступательное движение. Крылья движутся в диапазоне 90 угловых градусов и могут изменять угол наклона для улучшения аэродинамики полета точно так, как это делают крылья реального насекомого.
Самое большое отклонение от того, что создала природа, заключается в хвостовой части робота, которая очень похожа на хвостовое оперение самолета. Эта часть необходима роботу для того, чтобы обеспечивать стабильность робота, не позволяя ему отклоняться от курса и вращаться вокруг оси во время полета. Реальное насекомое делает все это путем независимого контроля движений каждого крыла, но у робота нет такой возможности, поэтому ему необходимы дополнительные элементы конструкции. Помимо этого, робот FWMAV не может подняться в воздух самостоятельно и нуждается в пусковой катапульте.
По сравнению с роботом-пчелой RoboBee, который может самостоятельно взлетать, зависать, совершать маневры и даже нырять под воду, робот FWMAV выглядит достаточно примитивным. Однако исследователи говорят, что это является лишь "первой пробой пера", в скором времени они собираются внести в конструкцию робота кардинальные усовершенствования, реализовать технологию независимого управления движением каждого крыла и снабдить его более мощным вычислителем, что позволит роботу летать и за пределами области, контролируемой внешним компьютером, на котором сейчас лежит ответственность за обработку данных и расчеты нескольких обратных связей в режиме реального времени.
 Политика «Трамп погодився на те, щоби Байден дозволив ЗСУ бити вглиб ворога, – ЗМІ»
Политика «Трамп погодився на те, щоби Байден дозволив ЗСУ бити вглиб ворога, – ЗМІ»  Мир «В ООН затверджено програму фінансової підтримки України»
Мир «В ООН затверджено програму фінансової підтримки України»  Политика «Український бізнес шокований заявами Шабуніна із критикою законопроєкту: "радянським минулим тягне з кожної дірки"»
Политика «Український бізнес шокований заявами Шабуніна із критикою законопроєкту: "радянським минулим тягне з кожної дірки"»  Наука и техника «SpaceX произвела шестой тестовый запуск ракеты Starship»
Наука и техника «SpaceX произвела шестой тестовый запуск ракеты Starship»  Происшествия «Проти дітей у Маріуполі рашисти застосовують навіть каральну психіатрию»
Происшествия «Проти дітей у Маріуполі рашисти застосовують навіть каральну психіатрию»  Происшествия «Военных из КНДР в рф приписали к морской пехоте и ВДВ»
Происшествия «Военных из КНДР в рф приписали к морской пехоте и ВДВ»